Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Ср фев 22, 2023 10:23:39
Не забудь ещё поставить два дросселя и заземлить сам мотор! Обязательно! Все корпуса металлические шунтировать!
У меня не дросселей не стоит, и мотор не заземлен...и совсем все не плохо. Когда только собирал установку и налаживал, поставил и дроссели с кондерами, и мотор заземлил. В итоге пробило обмотку на корпус, и вылетели ключи. Ключи с мотором поменял, всю эту требуху выкинул, и вот сколько лет работает все нормально, без сбоев. И пропусков у себя я ни разу не наблюдал.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Чт фев 23, 2023 08:00:13
Мой опыт показывает, что проблемы в установке в основном возникают из-за плохой коммуникации между установкой и компом. При подсоединении через USB надо очень большое внимание уделить качеству USB кабеля. На нашем рынке очень большое количество плохих кабелей. Их часто делают из очень тонких и не всегда медных проводов. Замена кабеля может привести к неожиданным результатам.
Также при использовании для связи ком порта могут возникать проблемы из-за преобразователя USB-COM. Так я столкнулся с тем что при использовании преобразователя на PL2303 переставал нормально работать режим подбора коэффициентов ПИД регулятора. В крайних положениях могла замирать каретка и сыпались ошибки связи. Помогало снижение скорости обмена вдвое с 921600 бод. Правда это требовало корректировки скорости в прошивке и на компе.
Кстати сейчас обнаружил, с преобразователем на чипе CH340 такая же проблема.
С чипом CP2102 все нормально.
Также при использовании для связи ком порта могут возникать проблемы из-за преобразователя USB-COM. Так я столкнулся с тем что при использовании преобразователя на PL2303 переставал нормально работать режим подбора коэффициентов ПИД регулятора. В крайних положениях могла замирать каретка и сыпались ошибки связи. Помогало снижение скорости обмена вдвое с 921600 бод. Правда это требовало корректировки скорости в прошивке и на компе.
Кстати сейчас обнаружил, с преобразователем на чипе CH340 такая же проблема.
С чипом CP2102 все нормально.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Сб фев 25, 2023 20:47:43
При подсоединении через USB надо очень большое внимание уделить качеству USB кабеля. На нашем рынке очень большое количество плохих кабелей. Их часто делают из очень тонких и не всегда медных проводов.
Не кажется странным что один и тот же кабель не работает только на установке а на других устройствах работает? Это дело не в кабеле, а в питании USB хоста и самого хоста. Они капризные. Так у меня проблема появляется иногда когда установка долго стоит без дела, просто шнур туда суда несколько раз в разъём вставлю и всё. Один только шнур никак не хотел работать и то это на нескольких утсройствах. Заказывал несколько штук микросхем с алика первые два не заработали, третий заработал, я про Fe1.1s концентратор usb 2,0 говорю. Сейчас любой шнур вставлю и всё работает без проблем.
по поводу COM порта. Сейчас обсуждается установка с USB никакого КОМ порта нет в ней. Вам же написали SDimok, в его решении используется USB. Вы уже второй раз пишите непонятное.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Сб фев 25, 2023 21:10:45
Человек изучает протокол обмена компа с установкой. На физическом уровне это проще делать с сом портом.alex01981 писал(а):по поводу COM порта. Сейчас обсуждается установка с USB никакого КОМ порта нет в ней. Вам же написали SDimok, в его решении используется USB. Вы уже второй раз пишите непонятное.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вс фев 26, 2023 10:10:31
Не кажется странным что один и тот же кабель не работает только на установке а на других устройствах работает? Это дело не в кабеле, а в питании USB хоста и самого хоста.
по поводу COM порта. Сейчас обсуждается установка с USB никакого КОМ порта нет в ней. Вам же написали SDimok, в его решении используется USB. Вы уже второй раз пишите непонятное.
по поводу COM порта. Сейчас обсуждается установка с USB никакого КОМ порта нет в ней. Вам же написали SDimok, в его решении используется USB. Вы уже второй раз пишите непонятное.
Видно, что у вас недостаточно опыта в использовании коммуникаций. Реализация интерфейса бывает разная.
В этой установке микроконтроллер жестко завязан на взаимодействие с хостом, каковым является компьютер под управлением Windows.
Из вашего поста следует, что за хост вы принимаете USB hub. Это не совсем так. Не думаю, что следует описывать работу интерфейса USB здесь. Почитайте побольше информации по данному вопросу.
Второе ваше утверждение, что в установке "никакого КОМ порта нет в ней" просто ложно. В контроллере установки используется одна и та же авторская прошивка, которая поддерживает подключение к хосту двумя способами как СОМ порт, так и USB HID. Она прекрасно может взаимодействовать с хостом, использующим любой способ подключения. SDimok просто не стал поддерживать подключение по COM.
Добавлено after 1 hour 48 minutes 46 seconds:
Могу поделиться с сообществом результатами своих исследований.
1. Как упоминалось выше, установка может использовать два типа подключения к хосту, COM и USB.
2. Основной режим - режим засветки.
3. Вспомогательный - режим подбора коэффициентов ПИД регулятора скорости.
Несколько слов об интерфейсе с компом. Любой интерфейс обладает понятием "пропускная способность".
В любой установке необходимо сделать так чтобы объем передаваемой информации в единицу времени не превышал возможности канала связи.
Рассмотрим третий вспомогательный режим. В нем довольно быстро можно столкнуться с ограниченной пропускной способностью канала связи.
При поступлении команды старт от программы верхнего уровня контроллер запускает движение каретки, подавая сигнал ШИМ на вывод PB14 или PB13 в зависимости от направления движения. Каретка начав двигаться перемещает датчик энкодера вдоль ленты, вызывая прерывания контроллере в результате которых с помощью внутреннего таймера вычисляется время прохождения между между метками на ленте.
Расстояние между штрихами на ленте известно. Значит можно рассчитать мгновенную скорость перемещения каретки. Контроллер сравнивает эту скорость с заданной в программе верхнего уровня и используя возможности ПИД регулятора старается их выровнять. При этом все значения мгновенной скорости контроллер складывает в буфер для последующей передачи на хост по окончании строки заданной длины. Далее при достижении конца строки контроллер выключает ШИМ на одной ножке, ждет остановки каретки, пересылает данные из буфера на хост для отображения на графике скорости и напряжения на двигателе. После этого контроллер начинает выдавать ШИМ на другом выходе для движения в обратную сторону.
Так вот такой режим работы увеличивает нагрузку на канал связи. Кстати нагрузка на канал возрастает при попытках увеличить задаваемую скорость движения. Как результат возможно появления ошибок в обмене, что отражается в счетчике ошибок программы.
Это особенно заметно при использовании ком порта для связи.
Может быть не нужно столь подробно объяснять алгоритм работы в этой ветке. Хочется услышать мнение сообщества на этот счет.
Одно могу сказать точно, что стремление увеличить скорость движения повышает вероятность появления ошибок канала и как следствие затормаживание движения в крайних положениях. В авторском алгоритме взаимодействия контроллера с компом предусмотрен режим повтора при несовпадении контрольной суммы.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вс фев 26, 2023 11:42:51
Есть ремень GT2 и шкив на 20 зубьев для передвижения стола, вопрос как правильно в HLDI настроить?. Хотел поменять вместо трапециевидного винта.
Последний раз редактировалось rindo Вс фев 26, 2023 11:48:34, всего редактировалось 1 раз.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вс фев 26, 2023 14:30:38
Есть ремень GT2 и шкив на 20 зубьев для передвижения стола, вопрос как правильно в HLDI настроить?.
Настройка такая же, как и с винтом. С самого начала пользуюсь только ремнём. Собрано несколько установок, проблем нет. В теме выкладывал фото.
Добавлено after 1 hour 3 minutes 35 seconds:
вот здесь фото viewtopic.php?f=8&t=186310&p=4377859#p4377859
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вт фев 28, 2023 09:21:09
Участники форума возник вопрос по силовым транзисторам каретки,у mial он вроде на irf7341,есть версия на irfr024 от Ruzik.Пока только плату развожу,как irf7341 по нагреву?
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вт фев 28, 2023 09:22:58
Градусов 40. Ни одного выхода из строя транзисторов, за много лет эксплуатации не было. Но не забудьте про драйвера.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вт фев 28, 2023 09:27:28
Градусов 40. Ни одного выхода из строя транзисторов, за много лет эксплуатации не было. Но не забудьте про драйвера.
Cпасибо за быстрый ответ,вернее я буду использовать si9945 вроде как по характеристикам похожи к тому же есть в наличии на работе.ir2184s я уже купил.Ну накрайняк куплю irf7341.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вт фев 28, 2023 09:34:41
Участники форума возник вопрос по силовым транзисторам каретки,у mial он вроде на irf7341,есть версия на irfr024 от Ruzik.Пока только плату развожу,как irf7341 по нагреву?
У меня irfr024, один раз вылетел один, из за того что обмотка двигла на корпус села, я писал несколькими постами выше. Т.е. была конкретная причина. Транзисторы еле теплые, и тоже много лет полет нормальный.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вт фев 28, 2023 09:42:27
Участники форума возник вопрос по силовым транзисторам каретки,у mial он вроде на irf7341,есть версия на irfr024 от Ruzik.Пока только плату развожу,как irf7341 по нагреву?
У меня irfr024, один раз вылетел один, из за того что обмотка двигла на корпус села, я писал несколькими постами выше. Т.е. была конкретная причина. Транзисторы еле теплые, и тоже много лет полет нормальный.
Просто я сейчас плату развожу под свое железо в "спринте" и стараюсь делать по компактней,да irf024 у меня нет,есть полевики,но на 30в такие я как понял по напруге не пойдут хоть питание и 24в.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вт фев 28, 2023 09:57:00
30 В мало. Про выбросы движка забыли ? Там запасик нужен.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вт фев 28, 2023 10:09:51
30 В мало. Про выбросы движка забыли ? Там запасик нужен.
Нет я не забыл,по этому и буду разводить под si9945 почти аналог irf7341.Ну а заказывать irf024 из китая ну такое себе занятие:))
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Ср мар 08, 2023 20:33:44
Собрал таки плату вроде работает.Энкодер еще не подключал и лазер.А как настраивать вообще смутно представляю.

А работы еще ооооо.

А работы еще ооооо.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Пн мар 13, 2023 10:37:16
Участники форума прошу помощи с настройкой каретки и правильно ли я подключил сигналы с энкодера?

Движение каретки влево красной стрелкой подрисовал
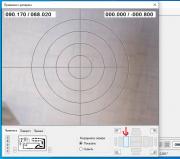
здесь то что нажимаю красная стрелка счет идет в минус а как должно быть?

Просто начинаю настройку скорости в программе каретка упирается в край хода ну и приходится вырубать питание.Координаты при настройки скорости нужно как то обнулять?И где прочитать про "горячие клавиши" управлени установкой?

Движение каретки влево красной стрелкой подрисовал

здесь то что нажимаю красная стрелка счет идет в минус а как должно быть?

Просто начинаю настройку скорости в программе каретка упирается в край хода ну и приходится вырубать питание.Координаты при настройки скорости нужно как то обнулять?И где прочитать про "горячие клавиши" управлени установкой?
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Пн мар 13, 2023 12:06:30
и правильно ли я подключил сигналы с энкодера?
при движении каретки слева направо координаты должны возрастать в плюс
На первой странице поищите ответы.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Пн мар 13, 2023 22:20:56
при движении каретки слева направо координаты должны возрастать в плюс
Двигать каретку нужно руками в этом случае. Если прибавляется, а каретка все равно едет не туда при нажатии стрелок, то поменять полярность на двигателе.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вт мар 14, 2023 08:16:01
Координаты при настройки скорости нужно как то обнулять?
Координата по Х обнуляется при старте контроллера. За ноль принимается начальное положение каретки при старте контроллера. Правильное направление движения после старта - слева-направо. В дальнейшем эта стартовая точка запоминается контроллером и после остановки каретки нажатием на кнопку стоп в программе она остановится либо в левом либо в правом положении. При этом это положение никогда не совпадет с нулевым из-за инерциального выбега каретки после снятия сигнала ШИМ с двигателя. При повторном старте программы установки скорости каретка сначала передвинется с небольшой скоростью в нулевое положение и затем начнется ее движение туда-сюда с заданной скоростью. Конечно при снятии питания с контроллера положение нулевой точки сотрется и при новом запуске нулевое положение запомнится заново.
Re: Лазерная установка для засветки фоторезиста от AlphaCrow
Вт мар 14, 2023 15:00:48
Спасибо всем кто откликнулся. С этим разобрался вроде.
Другая проблема:каретка от принтера epson fx6600 так вроде не сильно разболтана, но чет настроить скорость каретки в программе не смог.В итоге заменил двигатель каретки RS-445PA-14233(на него есть даташит от 12-42в-6500об/мин) на двигатель от CANON IP3600 QK1-1500 даташита на него нет,дамаю он 32вольта сколько оборотов хз.Шкивы на движках не менял т.к шаг совпадает.Проблема в том что не могу свести скорость и напряжение в одну линию.Vдв24в,Vmax-24в,Vmin-5,5в скорость 1000мм/c.И как должно быть правильно-сплошная линия на графике?
Заодно и про реперы спрошу честно говоря не понял как засверлить эти реперы не имея чпу станка?
Другая проблема:каретка от принтера epson fx6600 так вроде не сильно разболтана, но чет настроить скорость каретки в программе не смог.В итоге заменил двигатель каретки RS-445PA-14233(на него есть даташит от 12-42в-6500об/мин) на двигатель от CANON IP3600 QK1-1500 даташита на него нет,дамаю он 32вольта сколько оборотов хз.Шкивы на движках не менял т.к шаг совпадает.Проблема в том что не могу свести скорость и напряжение в одну линию.Vдв24в,Vmax-24в,Vmin-5,5в скорость 1000мм/c.И как должно быть правильно-сплошная линия на графике?
Заодно и про реперы спрошу честно говоря не понял как засверлить эти реперы не имея чпу станка?
Последний раз редактировалось ncbelov Вт мар 14, 2023 15:12:06, всего редактировалось 1 раз.