Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Сб янв 06, 2024 20:12:46
TEPEM писал(а):Есть три неприятные функции в хале, которые я пытаюсь заменить cmsis.
Если я правильно понял, ТС используется SPI для работы с W25Qxxx. Вот простейший вариант реализации доступа к этой микросхеме. Работает на STM32F4.
Спойлер
- Код:
#define W25Q_GUARD ( 40'000'000 )
////////////////////////////////////////////////////////////////////////////////
uint8
W25Q::SPI_exchange( uint8 _aByte )
{
uint8
tmp8;
int32
guard = W25Q_GUARD;
while( ( spi -> SR & SPI_SR_RXNE ) && ( guard > 0 ) )
{
tmp8 = spi -> DR;
guard--;
};
if( guard <= 0 )
{
theMemoryIsBad = true;
#ifdef DEBUG
log_printf
(
MsgCat::ERR,
"FTP : W25Q : Memory is bad. Line %d.\n", __LINE__
);
#endif
return( 0 );
}
*( volatile uint8 *)&( spi -> DR) = _aByte;
guard = W25Q_GUARD;
while( ( !( spi -> SR & SPI_SR_RXNE ) ) && ( guard > 0 ) )
{
guard--;
}
if( guard <= 0 )
{
theMemoryIsBad = true;
#ifdef DEBUG
log_printf
(
MsgCat::ERR,
"FTP : W25Q : Memory is bad. Line %d.\n", __LINE__
);
#endif
return( 0 );
}
tmp8 = *( volatile uint8*)&( spi -> DR );
return( tmp8 );
}
////////////////////////////////////////////////////////////////////////////////
uint8
W25Q::SPI_readByte( void )
{
if( theMemoryIsBad == true )
{
return( 0 );
}
return( SPI_exchange( 0 ) );
}
////////////////////////////////////////////////////////////////////////////////
uint16
W25Q::SPI_readBytes( uint8* _buff, uint16 _n )
{
if( theMemoryIsBad == true )
{
return( 0 );
}
if( ( _buff == 0 ) || ( _n == 0 ) )
{
return( 0 );
}
uint16
i = _n;
while( i )
{
*_buff = SPI_readByte();
_buff++;
i--;
if( isFault() )
{
return( 0 );
}
}
return( _n );
}
////////////////////////////////////////////////////////////////////////////////
void
W25Q::SPI_writeByte( uint8 _aByte )
{
if( theMemoryIsBad == true )
{
return;
}
SPI_exchange( _aByte );
}
////////////////////////////////////////////////////////////////////////////////
uint16
W25Q::SPI_writeBytes( uint8* _buff, uint16 _n )
{
if( theMemoryIsBad == true )
{
return( 0 );
}
if( ( _buff == 0 ) || ( _n == 0 ) )
{
return( 0 );
}
uint16
i = _n;
while( i )
{
SPI_writeByte( *_buff );
_buff++;
i--;
if( isFault() )
{
return( 0 );
}
}
return( _n );
}
////////////////////////////////////////////////////////////////////////////////
bool
W25Q::isFault( void )
{
return( theMemoryIsBad );
}
////////////////////////////////////////////////////////////////////////////////
На всякий случай настройка SPI под эту микруху.
Спойлер
- Код:
...
spi -> CR1 =
( 0 << SPI_CR1_BIDIMODE_Pos ) | // 15
( 0 << SPI_CR1_BIDIOE_Pos ) | // 14
( 0 << SPI_CR1_CRCEN_Pos ) | // 13
( 0 << SPI_CR1_CRCNEXT_Pos ) | // 12
( 0 << SPI_CR1_DFF_Pos ) | // 11
( 0 << SPI_CR1_RXONLY_Pos ) | // 10 Fullduplex
( 1 << SPI_CR1_SSM_Pos ) | // 9 Software slave management disabled
( 1 << SPI_CR1_SSI_Pos ) | // 8
( 0 << SPI_CR1_LSBFIRST_Pos ) | // 7 MSB передается первым
( 0 << SPI_CR1_SPE_Pos ) | // 6 Пока _не_ включаем SPI!
( br << SPI_CR1_BR_Pos ) | // 5..3 делитель шины для тактирования SPI;
( 1 << SPI_CR1_MSTR_Pos ) | // 2 Master
( 0 << SPI_CR1_CPOL_Pos ) | // 1 полярность тактового сигнала
( 0 << SPI_CR1_CPHA_Pos ); // 0 Фаза тактового сигнала
spi -> CR2 = \
( 0 << SPI_CR2_TXEIE_Pos ) | // Tx buffer empty interrupt enable
( 0 << SPI_CR2_RXNEIE_Pos ) | // RX buffer not empty interrupt enable
// This bit controls the generation of an interrupt when an error
// condition occurs )(CRCERR, OVR, MODF in SPI mode, FRE in TI mode and
// UDR, OVR, and FRE in I2S mode).
( 0 << SPI_CR2_ERRIE_Pos ) |
( 0 << SPI_CR2_FRF_Pos ) | // 0/1 - Motorola/TO mode
( 0 << SPI_CR2_SSOE_Pos ) | // SS output enable
( 0 << SPI_CR2_TXDMAEN_Pos ) | // Tx buffer DMA enable
( 0 << SPI_CR2_RXDMAEN_Pos ); // Rx buffer DMA enable
spi -> CR1 |= ( 1 << SPI_CR1_SPE_Pos );
...
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Сб янв 06, 2024 21:01:04
Не, она у меня на борту и отлично работает уже второй год. Я радиомодуль прикручиваю. И вот осцилограмма странная
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Пт янв 19, 2024 06:33:51
_
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Пт янв 19, 2024 09:31:22
Стандартный путь пойти на сайт производителя и посмотреть схему чем не устраивает?
Обычные линейные стабилизаторы это. А в каком месте маркировка не английском там?
Обычные линейные стабилизаторы это. А в каком месте маркировка не английском там?
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Ср янв 24, 2024 12:49:48
Владислав! Вся надежда на Вас как обычно) И снова здравствуйте)
TIM2_CH2 дает шим на hcpl3120 та на транзистор и тот на двигатель.
Вот такой код
Кнопочка там делает TIM2->CR1 |= TIM_CR1_CEN; и все работает.
Но есть одно огромное НО. Запуск при подаче питания на плату, с порта вылетает +3в. ИБП не расчитан на прямое включение, оффает сразу от такого подката. Да и фиг бы с ним. Но и движку крутится не надо без кнопки. Ни какие танцы с бубном вокруг подтяжки порта не чего не дают. Более того только выключение 2го канала таймера избавляет от этого плевка в начале, но стоит его включиить и шим начинается с этого плевка. Я уже хз что делать хоть дополнительный ключ ставить в схему управления драйвером. Выручайте пж
TIM2_CH2 дает шим на hcpl3120 та на транзистор и тот на двигатель.
Вот такой код
- Код:
GPIOB->MODER |= GPIO_MODER_MODER3_1;
GPIOB->PUPDR |= GPIO_PUPDR_PUPD3_1;
GPIOB->AFR[0] |= 0x00001000;//PB3 AF1 - TIM2_CH2
TIM2->CR1 |= TIM_CR1_ARPE; // buffer the ARR register (not esp useful in this example)
TIM2->PSC = 96000000/1000000-1; // scale to 1us
const int freq = 800; // Hz
TIM2->ARR = 1000000/freq; // convert freq to counts. Auto Reload Register
TIM2->CCR2 = TIM2->ARR/10; // Duty cycle 50% on Compare/Capture Register 2
TIM2->CCMR1 |= TIM_CCMR1_OC2PE // Enable preload for channel 2
| (0b110 << TIM_CCMR1_OC2M_Pos); // PWM mode 1
TIM2->CCER |= TIM_CCER_CC2E; // Enable Capture Compare for channel 2
TIM2->EGR |= TIM_EGR_UG;
Кнопочка там делает TIM2->CR1 |= TIM_CR1_CEN; и все работает.
Но есть одно огромное НО. Запуск при подаче питания на плату, с порта вылетает +3в. ИБП не расчитан на прямое включение, оффает сразу от такого подката. Да и фиг бы с ним. Но и движку крутится не надо без кнопки. Ни какие танцы с бубном вокруг подтяжки порта не чего не дают. Более того только выключение 2го канала таймера избавляет от этого плевка в начале, но стоит его включиить и шим начинается с этого плевка. Я уже хз что делать хоть дополнительный ключ ставить в схему управления драйвером. Выручайте пж
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Ср янв 24, 2024 15:11:26
Берём отладчик в руки и останавливаемся на команде включения таймера. Непосредственно сразу перед её выполнением смотрим состояние всех регистров. Выход CH2 это функция от значения этих регистров. Тыкаем в отладчике значения и смотрим какой бит влияет на неправильное поведение.
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Вс янв 28, 2024 15:52:52
так там и должна быть "1", исходно CNT < CCR =ARR/10. чего не так?
"110: PWM mode 1 (режим 1 ШИМ) - при счете вверх канал 1 активен (OC1REF=1), пока TIMx_CNT < TIMx_CCR1, иначе не активен (OC1REF=0). "
при включении TIM2->CCER |= TIM_CCER_CC2E;
состояние OCxREF отображается на ногу.
"110: PWM mode 1 (режим 1 ШИМ) - при счете вверх канал 1 активен (OC1REF=1), пока TIMx_CNT < TIMx_CCR1, иначе не активен (OC1REF=0). "
при включении TIM2->CCER |= TIM_CCER_CC2E;
состояние OCxREF отображается на ногу.
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Сб фев 03, 2024 00:34:16
Просто сделал програмный шим.
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Вт фев 06, 2024 23:35:28
Правильно, долой всю аппаратную периферию... 

Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Чт мар 07, 2024 20:22:26
Здравствуйте! Подключаю дисплей ST7735 к 32L476. SPI1. Использую проверенную инициализацию. И он вроде запускается, рябь все дела. А залить не заливается.
Единственное что поменял кроме пинов - переключение 8 / 16 битовой передачи. Ибо до этого юзал 411 стм. Там было SPI2->CR1 &= ~SPI_CR1_DFF;
А в 476 нет DEF и вместо него я юзаю SPI1->CR1 &= ~SPI_CR1_CRCL;
Вроде синониумы. Еще грешу на пины дисплея TP0 & TP1 они у меня в воздухе. Подскажите пж, давно сношаюс
вот код инициализации и заливки

Ну и соответственно вызывается ини потом буффер
Единственное что поменял кроме пинов - переключение 8 / 16 битовой передачи. Ибо до этого юзал 411 стм. Там было SPI2->CR1 &= ~SPI_CR1_DFF;
А в 476 нет DEF и вместо него я юзаю SPI1->CR1 &= ~SPI_CR1_CRCL;
Вроде синониумы. Еще грешу на пины дисплея TP0 & TP1 они у меня в воздухе. Подскажите пж, давно сношаюс
вот код инициализации и заливки
Спойлер
- Код:
void Send_CMD(uint8_t dat)
{
CS_LOY; //ChipSelect loy
DC_LOY; //DC LoyLevel
SPI1->CR1 &= ~SPI_CR1_CRCL;
while (!(SPI1->SR & SPI_SR_TXE));
SPI1->DR = dat;
while (!(SPI1->SR & SPI_SR_TXE));
while ((SPI1->SR & SPI_SR_BSY));
CS_H; //ChipSelect Up
}
void Send_DAT(uint8_t dat){
CS_LOY; //ChipSelect loy
DC_H; //DC H
SPI1->CR1 &= ~SPI_CR1_CRCL;
while (!(SPI1->SR & SPI_SR_TXE));
SPI1->DR = dat;
while (!(SPI1->SR & SPI_SR_TXE));
while ((SPI1->SR & SPI_SR_BSY));
CS_H;//ChipSelect Up
}
void Send_DAT16(uint16_t dat){
CS_LOY; //ChipSelect loy
DC_H; //DC H
SPI1->CR1 |= SPI_CR1_CRCL;
while (!(SPI1->SR & SPI_SR_TXE)){};
SPI1->DR = dat;
while (!(SPI1->SR & SPI_SR_TXE)){};
while ((SPI1->SR & SPI_SR_BSY)){};
CS_H;//ChipSelect Up
}
void LCD_Init()
{
CS_LOY; //ChipSelect loy
SPI1->CR1 |= SPI_CR1_SPE;//On Spi1
RST_H; //RST Hay
Delay(5);
RST_LOY; //RST loy
Delay(15);
RST_H; //RST Hay
Delay(15);
Send_CMD(0x01);//Sbros nastroek
Delay(35);
Send_CMD(ST77XX_SWRESET);
Delay(150);
Send_CMD(ST77XX_SLPOUT);
Delay(500);
Send_CMD(ST7735_FRMCTR1);
Send_DAT(0x01);
Send_DAT(0x2C);
Send_DAT(0x2D);
Send_CMD(ST7735_FRMCTR2);
Send_DAT(0x01);
Send_DAT(0x2C);
Send_DAT(0x2D);
Send_CMD(ST7735_FRMCTR3);
Send_DAT(0x01);
Send_DAT(0x2C);
Send_DAT(0x2D);
Send_DAT(0x01);
Send_DAT(0x2C);
Send_DAT(0x2D);
Send_CMD(ST7735_INVCTR);
Send_DAT(0x07);
Send_CMD(ST7735_PWCTR1);
Send_DAT(0xA2);
Send_DAT(0x02);
Send_DAT(0x84);
Send_CMD(ST7735_PWCTR2);
Send_DAT(0xC5);
Send_CMD(ST7735_PWCTR3);
Send_DAT(0x0A);
Send_DAT(0x00);
Send_CMD(ST7735_PWCTR4);
Send_DAT(0x8A);
Send_DAT(0x2A);
Send_CMD(ST7735_PWCTR5);
Send_DAT(0x8A);
Send_DAT(0xEE);
Send_CMD(ST7735_VMCTR1);
Send_DAT(0x0E);
Send_CMD(ST77XX_INVOFF);
Send_CMD(ST77XX_MADCTL);
Send_DAT(0xC0);
Send_CMD(ST77XX_COLMOD);
Send_DAT(0x05);
Send_CMD(ST7735_GMCTRP1);
Send_DAT(0x02);
Send_DAT(0x1C);
Send_DAT(0x07);
Send_DAT(0x12);
Send_DAT(0x37);
Send_DAT(0x32);
Send_DAT(0x29);
Send_DAT(0x2D);
Send_DAT(0x29);
Send_DAT(0x25);
Send_DAT(0x2B);
Send_DAT(0x39);
Send_DAT(0x00);
Send_DAT(0x01);
Send_DAT(0x03);
Send_DAT(0x10);
Send_CMD(ST7735_GMCTRN1);
Send_DAT(0x03);
Send_DAT(0x1D);
Send_DAT(0x07);
Send_DAT(0x06);
Send_DAT(0x2E);
Send_DAT(0x2C);
Send_DAT(0x29);
Send_DAT(0x2D);
Send_DAT(0x2E);
Send_DAT(0x2E);
Send_DAT(0x37);
Send_DAT(0x3F);
Send_DAT(0x00);
Send_DAT(0x00);
Send_DAT(0x02);
Send_DAT(0x10);
Send_CMD(ST77XX_NORON);
Delay(10);
Send_CMD(ST77XX_DISPON);
Delay(100);
CS_H;//ChipSelect Up
}
void SetWindow(uint16_t startX, uint16_t startY, uint16_t stopX, uint16_t stopY) {
Send_CMD(0x2A);
Send_DAT(0);
Send_DAT(startX);
Send_DAT(0);
Send_DAT(stopX);
Send_CMD(0x2B);
Send_DAT(0);
Send_DAT(startY);
Send_DAT(0);
Send_DAT(stopY);
}
void bufer()
{
uint16_t x = 0, y = 0;
SetWindow(10, 10, 128, 160);
Send_CMD(0x2C);
while(x++ <= 159)
{
y=0;
while(y++ <= 127)
{
Send_DAT16(0xFF00);//buf[128][160];
}
}
}

Ну и соответственно вызывается ини потом буффер
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Чт мар 07, 2024 22:04:40
У L476 FIFO на SPI и команда SPI1->DR = dat; записывает два байта. Переделайте на байтовый доступ там где это надо.
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Чт мар 07, 2024 22:09:33
Команды 8 битные передаются при стирании флага SPI1->CR1 &= ~SPI_CR1_CRCL;, а 16 битные при установке. Или я не то что то понял
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Чт мар 07, 2024 22:20:41
Команды 8 битные передаются при стирании флага SPI1->CR1 &= ~SPI_CR1_CRCL;, а 16 битные при установке. Или я не то что то понял
Нужно ещё и обращение к порту на 8 бит переделать.
*((__IO uint8_t *)&SPI1->DR) = dat;
И сам dat сделать uint8_t.
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Чт мар 07, 2024 22:27:49
Команды 8 битные передаются при стирании флага SPI1->CR1 &= ~SPI_CR1_CRCL;, а 16 битные при установке. Или я не то что то понял
Нужно ещё и обращение к порту на 8 бит переделать.
*((__IO uint8_t *)&SPI1->DR) = dat;
И сам dat сделать uint8_t.
Там uint8_t стоит dat.
Заработало. Но не понятно почему. Там написано в рефе по умолчанию CRCL не записан что соответствует 8 бит. я его еще и стираю на всякий. Почему не работало без
- Код:
*((__IO uint8_t *)&SPI1->DR) = dat;
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Чт мар 07, 2024 22:34:16
1. Читайте RM, там всё есть

2. Посмотрите ассемблерный листинг обоих вариантов и всё поймёте.
3. Разрядность dat вообще не причём.
Спойлер
2. Посмотрите ассемблерный листинг обоих вариантов и всё поймёте.
3. Разрядность dat вообще не причём.
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Чт мар 07, 2024 23:29:03
Спасибо вам большое ребята! Очень выручили а то я уже нос повесил.
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Пт мар 08, 2024 10:03:30
TEPEM, предлагаю слегка облагородить инициализацию. Ссылка на Compiler Explorer.
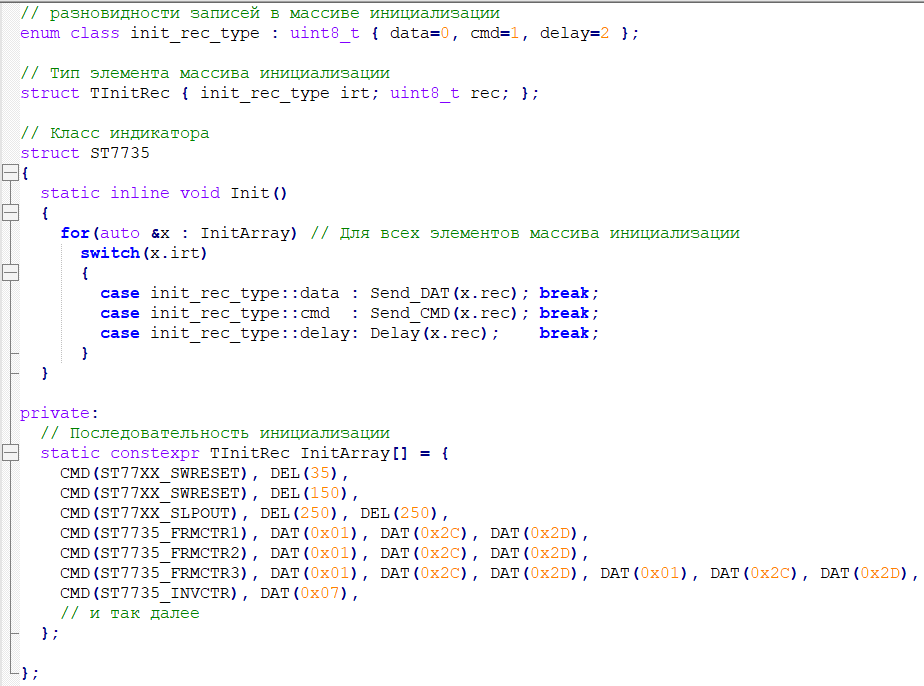
Ещё и размер кода уменьшится.
Спойлер
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Пт мар 08, 2024 14:02:29
VladislavS, можно же просто оформить значения инита в массив констант и оттуда в цикле вычитывать. Зачем эти пляски с объектами?
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Пт мар 08, 2024 14:17:30
VladislavS, можно же просто оформить значения инита в массив констант и оттуда в цикле вычитывать.
Собственно так и сделано. Только более современными средствами.Зачем эти пляски с объектами?
Где вы там объекты увидели? Покажите хоть один.PS: Насчёт зачем. Я смею утверждать, что этот код лучше оптимизируется компилятором.
Re: Микроконтроллеры STM32 - тонкости работы, отладочные пла
Сб мар 09, 2024 10:27:53
Где вы там объекты увидели? Покажите хоть один.
PS: Насчёт зачем. Я смею утверждать, что этот код лучше оптимизируется компилятором.
PS: Насчёт зачем. Я смею утверждать, что этот код лучше оптимизируется компилятором.
По ошибке бегло зацепился за токен class и обращение к членам. А потом уже увидел структуру. Ну да, так тоже можно, но я не уверен, что такая погоня за универсальностью (и удобством для человека) будет более оптимальным решением. Ну да ладно, решение достаточно изящно.