Re: плавный пуск + регулятор скорости коллекторного двигател
Ср сен 30, 2020 07:53:13
Болгарка плавно набирает обороты при запуске, когда регулятор установлен на минимум, после этого можно добавить обороты до нужной величины.
Re: плавный пуск + регулятор скорости коллекторного двигател
Ср сен 30, 2020 09:37:23
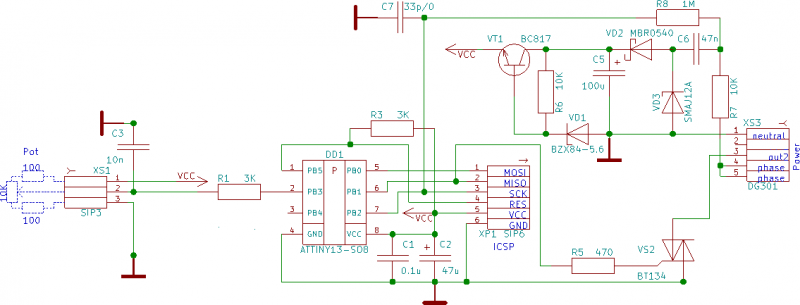
Там же еще МК будет? Или полностью схему нарисовать?BlackKilkennyCat писал(а):Это схема детектора перехода через ноль с бп, симистор к ней как-то рано.
С чего вы будете брать питание для этого транзистора?BlackKilkennyCat писал(а):Управляющий ток, если его действительно не хватает, обеспечивают транзистором. Зачем сразу лепить оптрон?
U2010B выдает 125 мА, это более чем достаточно для открытия любого симистора.
Понадобится высоковольтный транзистор и ...., напомните мне чем симистор отличается от тиристора?
MOC3023 - это готовое решение, с минимумом обвеса.
Мое мнение остается неизменным - существует специализированная микросхема фазового управления с обратной связью по току и защитой от перегрузки U2010B. Остальное "велосипед".
Но если все таки "велосипед", то сначала я бы собрал источник питания, нагрузил бы его нагрузкой 100 - 150 мА, светодиод поставил бы для визуального контроля, и раз так 50 включить-выключить, если не увидим "зарождение электрона", то все ОК.
Тут же прибором контролируем наличие 5 Вольт, осциллографом проверяем схему детектора, возможно так же применение стабилизатора AMS1117. (?)
PS на схеме не дорисовал один резистор килоом так на 300 параллельно С1.
Re: плавный пуск + регулятор скорости коллекторного двигател
Ср сен 30, 2020 10:54:24
таких микрух хватает
U2010B. лиш 1из них и не самая распространеная
у нас например в рознице не наблюдаю сейчас
U2010B. лиш 1из них и не самая распространеная
у нас например в рознице не наблюдаю сейчас
Re: плавный пуск + регулятор скорости коллекторного двигател
Ср сен 30, 2020 12:40:29
Там же еще МК будет? Или полностью схему нарисовать?
Вообще-то да. Какой смысл от очередного варианта бестрансформаторного питания и чем оно отличается от ранее описанных?
С чего вы будете брать питание для этого транзистора?
U2010B выдает 125 мА, это более чем достаточно для открытия любого симистора.
а она эти 125 мА где берет?
нетПонадобится высоковольтный транзистор
поясните, что имеете в виду, без намеков.и ...., напомните мне чем симистор отличается от тиристора?
дорого и много места. Кроме того, надо быть последовательным - какой смысл готовое решение в одном лишь месте? Давайте и всё остальное в виде готового решения, они есть.MOC3023 - это готовое решение, с минимумом обвеса.
Велосипеды изобретают до сих пор. Ваш вариант блока питания с детектором нуля - тот же велосипед, как и 99% радиолюбительских поделок в сегодняшнее время, к чему об этом разговаривать? Кроме того, существует куча различных требований к режимам работы электроприводов, и не всегда какая-то уникально-заточенная микросхема может их обеспечить. И как заметил musor, микросхема редкая, а вариант покупать на али - да лучше выкинуть электропривод и пойти пить чай...существует специализированная микросхема фазового управления с обратной связью по току и защитой от перегрузки U2010B. Остальное "велосипед".
Re: плавный пуск + регулятор скорости коллекторного двигател
Ср сен 30, 2020 12:53:38
U2010BBlackKilkennyCat писал(а):Давайте и всё остальное в виде готового решения, они есть.
Re: плавный пуск + регулятор скорости коллекторного двигател
Ср сен 30, 2020 13:08:27
ну, вот так лучше 
Re: плавный пуск + регулятор скорости коллекторного двигател
Чт окт 01, 2020 21:50:07
во че нашел!
фьюзы: Low = 0x2A , High = 0xFB
Добавлено after 5 hours 53 minutes 43 seconds:
Re: плавный пуск + регулятор скорости коллекторного двигателя
допишите плавный пуск, кому не трудно

Спойлер
#define F_CPU (9600000uL /#include "stdint.h"
#include "avr/io.h"
#include "avr/interrupt.h"
#include "util/delay.h"
#define PWM_AC_PULSE 4
#define PWM_MIN 5
#define PWM_MAX_DIF 10
#define LIMIT_INC 10
#define STARTUP_DELAY 50
#define KBD_ADC_THRESHOLD 5
#define KBD_CNT_ONOFF 5
#define KBD_CNT_ONOFF_THRESHOLD 50
#define KBD_CNT_LONG 200
inline void pwm2_on() { PORTB |= (1<<PB1); }
inline void pwm2_off(){ PORTB &= ~(1<<PB1); }
volatile uint8_t sync_flag; // PWM top sync flag
volatile uint8_t pwm_top=0xFF; // PWMs maximum
register uint8_t pwm_set[2] asm("r2"); // PWMS set
register uint8_t pwm_cur[2] asm("r4"); // PWMS current
register uint8_t pwm_ac asm("r6"); // AC sync flag
uint8_t limit_en[2] = {1,1},limit[2];
uint8_t startup_cnt = STARTUP_DELAY;
uint8_t kbd_en[2], kbd_cnt[2], kbd_prev[2],kbd_cur[2], kbd_inc[2];
int main(){
// setup
// GPIO
PORTB |= (1<<PB3)|(1<<PB2);
DDRB &= ~((1<<PB2)|(1<<PB3));
PORTB &= ~(1<<PB1);
DDRB |= (1<<PB1);
// PCINT
GIMSK |= (1<<PCIE);
PCMSK = (1<<PCINT2);
// timer 0
TCCR0A = 0;
TCCR0B = (1<<CS01)|(1<<CS00);
TIMSK0 = (1<<TOIE0)|(1<<OCIE0B)|(1<<OCIE0A);
// ADC
ADMUX = (1<<ADLAR)|(1<<MUX1);
ADCSRA = (1<<ADEN)|(1<<ADSC)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0);
ADCSRB = 0;
DIDR0 = 0;
pwm_set[0] = pwm_set[1] = 0xFF;
sei();
// main loop
while(1){
// ZC sync
if (sync_flag){
sync_flag = 0;
// decrement startup timer
if (startup_cnt) startup_cnt--;
// update limiters
else for (uint8_t i=0; i<2; i++){
if (limit_en[i] == 1){ // limit increment
if (limit[i] < (0xFF - LIMIT_INC)) limit[i] += LIMIT_INC;
else {
limit[i] = 0xFF;
limit_en[i] = 0;
}
} else if (limit_en[i] == 2){ // limit decrement
if (limit[i] > LIMIT_INC) limit[i] -= LIMIT_INC;
else {
limit[i] = 0;
limit_en[i] = 0;
}
}
}
// calculate PWMs
uint8_t pwm = (!pwm_set[0]) ? 0 : (pwm_set[0] < limit[0]) ? pwm_set[0] : limit[0];
pwm = pwm_top - (((uint16_t)pwm * pwm_top) >>
pwm_cur[0] = (startup_cnt || (pwm_set[0] < PWM_MIN)||((pwm_top - pwm) < PWM_MAX_DIF)) ? 0 : pwm;
pwm = (!pwm_set[1]) ? 0 : (pwm_set[1] < limit[1]) ? pwm_set[1] : limit[1];
pwm = pwm_top - (((uint16_t)pwm * pwm_top) >>
pwm_cur[1] = (startup_cnt || (pwm_set[1] < PWM_MIN)||((pwm_top - pwm) < PWM_MAX_DIF)) ? 0 : pwm;
// read ADC
if (ADMUX & (1<<MUX0)){ ADMUX &= ~(1<<MUX0); if (!kbd_en[1]) pwm_set[1] = ADCH;
} else { ADMUX |= (1<<MUX0); if (!kbd_en[0]) pwm_set[0] = ADCH; }
ADCSRA |= (1<<ADSC);
}
}
// exit
return 0;
}
ISR(TIM0_COMPB_vect){
if (pwm_cur[1]){
pwm2_on();
sei();
if (pwm_ac){
_delay_us(PWM_AC_PULSE);
pwm2_off();
}
}
}
ISR(TIM0_OVF_vect){
pwm2_off(); // PWMs off
pwm_top = 0xFF; // update PWM top
OCR0A = pwm_cur[0]; OCR0B = pwm_cur[1]; // reload PWMs
sync_flag = 1; pwm_ac = 0; // set Sync flag / reset AC flag
TIFR0 |= (1<<OCF0A)|(1<<OCF0B); // reset capture interrupts
}
// external interrupt on zero-cross
ISR(PCINT0_vect){
pwm2_off(); // PWMs off
pwm_top = TCNT0; // get PWM top
// uint8_t cnt = TCNT0; // get PWM top
TCNT0 = 0; // reset TCNT0
OCR0A = pwm_cur[0]; OCR0B = pwm_cur[1]; // reload PWMs
sync_flag = pwm_ac = 1; // set Sync/AC flag
// pwm_top = ((uint16_t)cnt + pwm_top) >> 1; // filter PWM top
TIFR0 |= (1<<OCF0A)|(1<<OCF0B)|(1<<TOV0); // reset capture interrupts
}
- Вложения
-
- t13-dim.zip
- (151.48 KiB) Скачиваний: 246
Re: плавный пуск + регулятор скорости коллекторного двигател
Пт окт 02, 2020 15:42:31
Спойлер
#define F_CPU (9600000uL / 8 )#include "stdint.h"
#include "avr/io.h"
#include "avr/interrupt.h"
#include "util/delay.h"
#define PWM_AC_PULSE 4
#define PWM_MIN 5
#define PWM_MAX_DIF 10
#define LIMIT_INC 10 //ПРЕДЕЛ
#define STARTUP_DELAY 50 //ЗАДЕРЖКА ЗАПУСКА
#define KBD_ADC_THRESHOLD 5 //ПОРОГ АЦП
inline void pwm2_on() { PORTB |= (1<<PB1); }
inline void pwm2_off(){ PORTB &= ~(1<<PB1); }
volatile uint8_t sync_flag; //Флаг верхней синхронизации ШИМ
volatile uint8_t pwm_top=0xFF; // Максимальное ШИМ
register uint8_t pwm_set[2] asm("r2"); // ШИМ-комплект
register uint8_t pwm_cur asm("r4"); // Ток ШИМ
register uint8_t pwm_ac asm("r6"); // Флаг синхронизации переменного тока
unsigned int start_first = 0; // флаг первого запуска
uint8_t limit_en[2] = {1,1},limit[2];
uint8_t startup_cnt = STARTUP_DELAY;
uint8_t kbd_en[2]; //kbd_inc[2];
int main(){
// setup
// GPIO
PORTB |= (1<<PB3)|(1<<PB2);
DDRB &= ~((1<<PB2)|(1<<PB3));
PORTB &= ~(1<<PB1);
DDRB |= (1<<PB1);
// PCINT
GIMSK |= (1<<PCIE);
PCMSK = (1<<PCINT2);
// timer 0
TCCR0A = 0;
TCCR0B = (1<<CS01)|(1<<CS00);
TIMSK0 = (1<<TOIE0)|(1<<OCIE0B)|(1<<OCIE0A);
// ADC
ADMUX = (1<<ADLAR)|(1<<MUX1);
ADCSRA = (1<<ADEN)|(1<<ADSC)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0);
ADCSRB = 0;
DIDR0 = 0;
sei();
// main loop
while(1){
// ZC sync
if (sync_flag){
sync_flag = 0;
//===плавный старт======================
if (start_first==0){
for (pwm_cur = 0; pwm_cur < 0xFF; pwm_cur++){
for (int k = 0; k<10000; k++){ // ПОТОМ УБРАТЬ !!!
if (!kbd_en[1]) pwm_set[1] = ADCH;
if (!kbd_en[0]) pwm_set[0] = ADCH;
}
}
start_first = 1;
}
//========
// таймер запуска уменьшение
if (startup_cnt) startup_cnt--;
// ограничители обновления
else for (uint8_t i=0; i<2; i++){
if (limit_en[i] == 1){ // предельное увеличение
if (limit[i] < (0xFF - LIMIT_INC)) limit[i] += LIMIT_INC;
else {
limit[i] = 0xFF;
limit_en[i] = 0;
}
} else if (limit_en[i] == 2){ //предельное уменьшение
if (limit[i] > LIMIT_INC) limit[i] -= LIMIT_INC;
else {
limit[i] = 0;
limit_en[i] = 0;
}
}
}
// расчет ШИМ
uint8_t pwm = (!pwm_set[0]) ? 0 : (pwm_set[0] < limit[0]) ? pwm_set[0] : limit[0];
pwm = pwm_top - (((uint16_t)pwm * pwm_top) >> 8 ) ;
pwm = (!pwm_set[1]) ? 0 : (pwm_set[1] < limit[1]) ? pwm_set[1] : limit[1];
pwm = pwm_top - (((uint16_t)pwm * pwm_top) >> 8 ) ;
pwm_cur = (startup_cnt || (pwm_set[1] < PWM_MIN)||((pwm_top - pwm) < PWM_MAX_DIF)) ? 0 : pwm;
// read ADC
if (ADMUX & (1<<MUX0)){ ADMUX &= ~(1<<MUX0); if (!kbd_en[1]) pwm_set[1] = ADCH;
} else { ADMUX |= (1<<MUX0); if (!kbd_en[0]) pwm_set[0] = ADCH; }
ADCSRA |= (1<<ADSC);
}
}
// exit
return 0;
}
ISR(TIM0_COMPB_vect){ //внешнее прирывание
if (pwm_cur){
pwm2_on();
sei();
if (pwm_ac){
_delay_us(PWM_AC_PULSE); //ШИМ-ИМПУЛЬС ПЕРЕМЕННОГО ТОКА
pwm2_off();
}
}
}
ISR(TIM0_OVF_vect){
pwm2_off(); // PWMs off
pwm_top = 0xFF; // обновление PWM сверху
OCR0B = pwm_cur; // перезарядка ШИМ
sync_flag = 1; pwm_ac = 0; // установить флаг синхронизации / сбросить флаг переменного тока
TIFR0 |= (1<<OCF0A)|(1<<OCF0B); // сброс прерываний захвата
}
// внешнее прерывание на нулевом пересечении
ISR(PCINT0_vect){
pwm2_off(); // PWMs off
pwm_top = TCNT0; // получить ШИМ сверху
// uint8_t cnt = TCNT0; //получить ШИМ сверху
TCNT0 = 0; // сброс TCNT0
OCR0B = pwm_cur; // перезарядка ШИМ
sync_flag = pwm_ac = 1; // установить флаг синхронизации/переменного тока
// pwm_top = ((uint16_t)cnt + pwm_top) >> 1; // фильтр ШИМ сверху
TIFR0 |= (1<<OCF0A)|(1<<OCF0B)|(1<<TOV0); // сброс прерываний захвата
}
ткните в код, пожалуйста, где эта "переменная" напряжения на центральном контакте переменного резистора.
чтобы при подачи питания скорость двигателя плавно возросла до этой "переменной"
for (pwm_cur = 0; pwm_cur < "переменная"на центральном контакте переменного резистора; pwm_cur++)
Re: плавный пуск + регулятор скорости коллекторного двигател
Пт окт 02, 2020 16:08:02
тэг 'Code' есть для исходников - покрасивше будет
переменная вроде эта с ацп считывается
переменная вроде эта с ацп считывается
- Код:
pwm_set[0] = ADCH;
Re: плавный пуск + регулятор скорости коллекторного двигател
Пт окт 02, 2020 23:39:11
- Код:
//===плавный старт===
if (start_first==0){
//int STOP =ADCH;
for (pwm_cur = 0xC8; pwm_cur > ADCH; pwm_cur--){
for (int k = 0; k<10000; k++){ // ПОТОМ УБРАТЬ !!!
if (!kbd_en[1]) pwm_set[1] =ADCH;
if (!kbd_en[0]) pwm_set[0] =ADCH;
}
}
start_first = 1;
}
//===================
НИ ФИГА НЕ ПОЛУЧАЕТСЯ
начинается с 0xC8 правильно, и не останавливаясь на середине примерно 0х7F увеличивает обороты до 0хFF и только потом становиться в нужное положение
порект взят с https://www.radiokot.ru/forum/viewtopic.php?p=2353553 автор ncp1400
- Вложения
-
- 13_dimmer.zip
- (75.06 KiB) Скачиваний: 212
Re: плавный пуск + регулятор скорости коллекторного двигател
Сб окт 03, 2020 11:17:02
вообще плавный пуск есть, но коротенький, удлинить наверное можно
повыкидывал "лишнее":
main.c
main.h

повыкидывал "лишнее":
main.c
Спойлер
- Код:
/*
* main.c
*
* Created on: May 11, 2015
* Author: qwer
*/
#include "main.h"
volatile uint8_t sync_flag; // PWM top sync flag
volatile uint8_t pwm_top = 0xFF; // PWMs maximum
register uint8_t pwm_set[2] asm("r2"); // PWMS set
register uint8_t pwm_cur[2] asm("r4"); // PWMS current
register uint8_t pwm_ac asm("r6"); // AC sync flag
uint8_t limit_en[2] = {1, 1}, limit[2];
uint8_t startup_cnt = STARTUP_DELAY;
uint8_t kbd_en[2], kbd_cnt[2], kbd_prev[2], kbd_cur[2], kbd_inc[2];
uint8_t pwm_sete[2] EEMEM;
register uint8_t eep_update_cnt asm("r7");
#define pwm2_on() PORTB |= (1 << PB1)
#define pwm2_off() PORTB &= ~(1 << PB1)
int main()
{
// setup
// GPIO
PORTB |= (1 << PB3) | (1 << PB4) | (1 << PB2);
DDRB &= ~((1 << PB2) | (1 << PB3) | (1 << PB4));
PORTB &= ~((1 << PB0) | (1 << PB1));
DDRB |= (1 << PB0) | (1 << PB1);
// PCINT
GIMSK |= (1 << PCIE);
PCMSK = (1 << PCINT2);
// timer 0
TCCR0A = 0;
TCCR0B = (1 << CS01) | (1 << CS00);
TIMSK0 = (1 << TOIE0) | (1 << OCIE0B) | (1 << OCIE0A);
// ADC
ADMUX = (1 << ADLAR) | (1 << MUX1);
ADMUX |= (1 << MUX0);
ADCSRA = (1 << ADEN) | (1 << ADSC) | (1 << ADPS2) | (1 << ADPS1) | (1 << ADPS0);
ADCSRB = 0;
DIDR0 = 0;
// check buttons/Pots
for (uint8_t i = 0; i < 2; i++)
{
while (ADCSRA & (1 << ADSC))
;
kbd_en[i] = (ADCH < KBD_ADC_THRESHOLD) || (ADCH > (0xFF - KBD_ADC_THRESHOLD));
if (kbd_en[i])
limit_en[i] = 0;
//ADMUX ^= (1 << MUX0);
ADCSRA |= (1 << ADSC);
}
// restore current power from EEPROM
// pwm_set[0] = eeprom_read_byte(&pwm_sete[0]);
// pwm_set[1] = eeprom_read_byte(&pwm_sete[1]);
// pwm_set[0] = pwm_set[1] = 0xFF;
EEARL = 0;
EECR |= (1 << EERE);
pwm_set[0] = EEDR;
EEARL = 1;
EECR |= (1 << EERE);
pwm_set[1] = EEDR;
sei();
// main loop
while (1)
{
// ZC sync
if (sync_flag)
{
sync_flag = 0;
// decrement startup timer
if (startup_cnt)
{
startup_cnt--;
}
// update limiters
else
{
for (uint8_t i = 0; i < 2; i++)
{
if (limit_en[i] == 1)
{ // limit increment
if (limit[i] < (0xFF - LIMIT_INC))
limit[i] += LIMIT_INC;
else
{
limit[i] = 0xFF;
limit_en[i] = 0;
}
}
else if (limit_en[i] == 2)
{ // limit decrement
if (limit[i] > LIMIT_INC)
limit[i] -= LIMIT_INC;
else
{
limit[i] = 0;
limit_en[i] = 0;
}
}
}
}
// calculate PWMs
uint8_t pwm = (!pwm_set[1]) ? 0 : (pwm_set[1] < limit[1]) ? pwm_set[1] : limit[1];
pwm = pwm_top - (((uint16_t)pwm * pwm_top) >> 8);
pwm_cur[1] = (startup_cnt || (pwm_set[1] < PWM_MIN) || ((pwm_top - pwm) < PWM_MAX_DIF)) ? 0 : pwm;
// read ADC
if (ADMUX & (1 << MUX0))
{
if (!kbd_en[1])
pwm_set[1] = ADCH;
}
ADCSRA |= (1 << ADSC);
}
}
// exit
return 0;
}
ISR(TIM0_COMPA_vect)
{
}
ISR(TIM0_COMPB_vect)
{
if (pwm_cur[1])
{
pwm2_on();
sei();
if (pwm_ac)
{
_delay_us(PWM_AC_PULSE);
pwm2_off();
}
}
}
ISR(TIM0_OVF_vect)
{
pwm2_off(); // PWMs off
pwm_top = 0xFF; // update PWM top
OCR0B = pwm_cur[1]; // reload PWMs
sync_flag = 1;
pwm_ac = 0; // set Sync flag / reset AC flag
TIFR0 |= (1 << OCF0A) | (1 << OCF0B); // reset capture interrupts
}
// external interrupt on zero-cross
ISR(PCINT0_vect)
{
pwm2_off(); // PWMs off
pwm_top = TCNT0; // get PWM top
// uint8_t cnt = TCNT0; // get PWM top
TCNT0 = 0; // reset TCNT0
OCR0B = pwm_cur[1]; // reload PWMs
sync_flag = pwm_ac = 1; // set Sync/AC flag
// pwm_top = ((uint16_t)cnt + pwm_top) >> 1; // filter PWM top
TIFR0 |= (1 << OCF0A) | (1 << OCF0B) | (1 << TOV0); // reset capture interrupts
}
main.h
Спойлер
- Код:
/*
* main.h
*
* Created on: May 11, 2015
* Author: qwer
*/
#ifndef MAIN_H_
#define MAIN_H_
#define F_CPU (9600000uL / 8)
#include "stdint.h"
#include "avr/io.h"
#include "avr/interrupt.h"
#include "util/delay.h"
#include "avr/eeprom.h"
#define PWM_AC_PULSE 4
#define PWM_MIN 5
#define PWM_MAX_DIF 10
#define LIMIT_INC 10
#define STARTUP_DELAY 50
#define KBD_ADC_THRESHOLD 5
#define KBD_CNT_ONOFF 5
#define KBD_CNT_ONOFF_THRESHOLD 50
#define KBD_CNT_LONG 200
#endif /* MAIN_H_ */
Re: плавный пуск + регулятор скорости коллекторного двигател
Сб окт 03, 2020 12:03:01
вообще плавный пуск есть, но коротенький, удлинить наверное можно
наверно...
я только второй день ломаю голову... еще вся жизнь впереди Re: плавный пуск + регулятор скорости коллекторного двигател
Сб окт 03, 2020 12:46:19
легким движением руки удлиняем в три раза (больше тоже легко - увеличиваем магическую цифру '3' ):
в main.h поменял
правда и ацп медленнее вычитывается...
Спойлер
- Код:
/*
* main.c
*
* Created on: May 11, 2015
* Author: qwer
*/
#include "main.h"
volatile uint8_t sync_flag; // PWM top sync flag
uint8_t sync_cnt;
volatile uint8_t pwm_top = 0xFF; // PWMs maximum
register uint8_t pwm_set[2] asm("r2"); // PWMS set
register uint8_t pwm_cur[2] asm("r4"); // PWMS current
register uint8_t pwm_ac asm("r6"); // AC sync flag
uint8_t limit_en[2] = {1, 1}, limit[2];
uint8_t startup_cnt = STARTUP_DELAY;
uint8_t kbd_en[2], kbd_cnt[2], kbd_prev[2], kbd_cur[2], kbd_inc[2];
uint8_t pwm_sete[2] EEMEM;
register uint8_t eep_update_cnt asm("r7");
#define pwm2_on() PORTB |= (1 << PB1)
#define pwm2_off() PORTB &= ~(1 << PB1)
int main()
{
// setup
// GPIO
PORTB |= (1 << PB3) | (1 << PB4) | (1 << PB2);
DDRB &= ~((1 << PB2) | (1 << PB3) | (1 << PB4));
PORTB &= ~((1 << PB0) | (1 << PB1));
DDRB |= (1 << PB0) | (1 << PB1);
// PCINT
GIMSK |= (1 << PCIE);
PCMSK = (1 << PCINT2);
// timer 0
TCCR0A = 0;
TCCR0B = (1 << CS01) | (1 << CS00);
TIMSK0 = (1 << TOIE0) | (1 << OCIE0B) | (1 << OCIE0A);
// ADC
ADMUX = (1 << ADLAR) | (1 << MUX1);
ADMUX |= (1 << MUX0);
ADCSRA = (1 << ADEN) | (1 << ADSC) | (1 << ADPS2) | (1 << ADPS1) | (1 << ADPS0);
ADCSRB = 0;
DIDR0 = 0;
// check buttons/Pots
for (uint8_t i = 0; i < 2; i++)
{
while (ADCSRA & (1 << ADSC))
;
kbd_en[i] = (ADCH < KBD_ADC_THRESHOLD) || (ADCH > (0xFF - KBD_ADC_THRESHOLD));
if (kbd_en[i])
limit_en[i] = 0;
//ADMUX ^= (1 << MUX0);
ADCSRA |= (1 << ADSC);
}
// restore current power from EEPROM
// pwm_set[0] = eeprom_read_byte(&pwm_sete[0]);
// pwm_set[1] = eeprom_read_byte(&pwm_sete[1]);
// pwm_set[0] = pwm_set[1] = 0xFF;
EEARL = 0;
EECR |= (1 << EERE);
pwm_set[0] = EEDR;
EEARL = 1;
EECR |= (1 << EERE);
pwm_set[1] = EEDR;
sync_cnt = 0;
sei();
// main loop
while (1)
{
// ZC sync
if (sync_flag)
{
sync_flag = 0;
if (++sync_cnt == 3)
{
sync_cnt = 0;
// decrement startup timer
if (startup_cnt)
{
startup_cnt--;
}
// update limiters
else
{
for (uint8_t i = 0; i < 2; i++)
{
if (limit_en[i] == 1)
{ // limit increment
if (limit[i] < (0xFF - LIMIT_INC))
limit[i] += LIMIT_INC;
else
{
limit[i] = 0xFF;
limit_en[i] = 0;
}
}
else if (limit_en[i] == 2)
{ // limit decrement
if (limit[i] > LIMIT_INC)
limit[i] -= LIMIT_INC;
else
{
limit[i] = 0;
limit_en[i] = 0;
}
}
}
}
}
// calculate PWMs
uint8_t pwm = (!pwm_set[1]) ? 0 : (pwm_set[1] < limit[1]) ? pwm_set[1] : limit[1];
pwm = pwm_top - (((uint16_t)pwm * pwm_top) >> 8);
pwm_cur[1] = (startup_cnt || (pwm_set[1] < PWM_MIN) || ((pwm_top - pwm) < PWM_MAX_DIF)) ? 0 : pwm;
// read ADC
if (ADMUX & (1 << MUX0))
{
if (!kbd_en[1])
pwm_set[1] = ADCH;
}
ADCSRA |= (1 << ADSC);
}
}
// exit
return 0;
}
ISR(TIM0_COMPA_vect)
{
}
ISR(TIM0_COMPB_vect)
{
if (pwm_cur[1])
{
pwm2_on();
sei();
if (pwm_ac)
{
_delay_us(PWM_AC_PULSE);
pwm2_off();
}
}
}
ISR(TIM0_OVF_vect)
{
pwm2_off(); // PWMs off
pwm_top = 0xFF; // update PWM top
OCR0B = pwm_cur[1]; // reload PWMs
sync_flag = 1;
pwm_ac = 0; // set Sync flag / reset AC flag
TIFR0 |= (1 << OCF0A) | (1 << OCF0B); // reset capture interrupts
}
// external interrupt on zero-cross
ISR(PCINT0_vect)
{
pwm2_off(); // PWMs off
pwm_top = TCNT0; // get PWM top
// uint8_t cnt = TCNT0; // get PWM top
TCNT0 = 0; // reset TCNT0
OCR0B = pwm_cur[1]; // reload PWMs
sync_flag = pwm_ac = 1; // set Sync/AC flag
// pwm_top = ((uint16_t)cnt + pwm_top) >> 1; // filter PWM top
TIFR0 |= (1 << OCF0A) | (1 << OCF0B) | (1 << TOV0); // reset capture interrupts
}
в main.h поменял
- Код:
#define STARTUP_DELAY 5
правда и ацп медленнее вычитывается...
Re: плавный пуск + регулятор скорости коллекторного двигател
Сб окт 03, 2020 13:33:43
интересный ход с тыла  , но это не то...
, но это не то...
надо завести "вредную-переменную" и крутить ее ставя в нее цифры больше-меньше
а она бы увеличивала время разгона двигателя или уменьшала

, но это не то...надо завести "вредную-переменную" и крутить ее ставя в нее цифры больше-меньше
а она бы увеличивала время разгона двигателя или уменьшала
Re: плавный пуск + регулятор скорости коллекторного двигател
Сб окт 03, 2020 14:00:36
так там еще можно крутить типа
- Код:
#define LIMIT_INC 1
Re: плавный пуск + регулятор скорости коллекторного двигател
Сб окт 03, 2020 14:51:42
#define LIMIT_INC
Я ТАК ПОНЯЛ - ЭТО ШАГИ ПЕРЕМЕННОГО РЕЗИСТОРА ИЛИ НЕТ?
Re: плавный пуск + регулятор скорости коллекторного двигател
Сб окт 03, 2020 15:40:33
не, онj участвует в значении переменной pwm, от которой зависит pwm_cur[1], которое записывают в OCR0B = pwm_cur[1]; // reload PWMs
типа на сколько добавить/убавить значение (самому не до конца понятный механизм)
- Код:
uint8_t pwm = (!pwm_set[1]) ? 0 : (pwm_set[1] < limit[1]) ? pwm_set[1] : limit[1];
типа на сколько добавить/убавить значение (самому не до конца понятный механизм)
- Код:
// limit increment
if (limit[i] < (0xFF - LIMIT_INC))
limit[i] += LIMIT_INC;
// limit decrement
if (limit[i] > LIMIT_INC)
limit[i] -= LIMIT_INC;
Re: плавный пуск + регулятор скорости коллекторного двигател
Пн окт 05, 2020 11:52:33
Спойлер
#define F_CPU (9600000uL / 8 )#include "stdint.h"
#include "avr/io.h"
#include "avr/interrupt.h"
#include "util/delay.h"
#define PWM_AC_PULSE 4
#define PWM_MIN 5
#define PWM_MAX_DIF 10
#define LIMIT_INC 10
#define STARTUP_DELAY 50
#define KBD_ADC_THRESHOLD 5
#define KBD_CNT_ONOFF 5
#define KBD_CNT_ONOFF_THRESHOLD 50
#define KBD_CNT_LONG 200
inline void pwm2_on() { PORTB |= (1<<PB1); }
inline void pwm2_off(){ PORTB &= ~(1<<PB1); }
unsigned int start_first = 0;
unsigned int STOP;
volatile uint8_t sync_flag; // PWM top sync flag
volatile uint8_t pwm_top=0xFF; // PWMs maximum
register uint8_t pwm_set asm("r2"); // PWMS set
register uint8_t pwm_cur asm("r4"); // PWMS current
register uint8_t pwm_ac asm("r6"); // AC sync flag
uint8_t limit_en = 1, limit;
uint8_t startup_cnt = STARTUP_DELAY;
int main(){
// setup
// GPIO
PORTB |= (1<<PB3)|(1<<PB2);
DDRB &= ~((1<<PB2)|(1<<PB3));
PORTB &= ~(1<<PB1);
DDRB |= (1<<PB1);
// PCINT
GIMSK |= (1<<PCIE);
PCMSK = (1<<PCINT2);
// timer 0
TCCR0A = 0;
TCCR0B = (1<<CS01)|(1<<CS00);
TIMSK0 = (1<<TOIE0)|(1<<OCIE0B)|(1<<OCIE0A);
// ADC
ADMUX = (1<<ADLAR)|(1<<MUX1)|(1<<MUX0);
ADCSRA = (1<<ADEN)|(1<<ADSC)|(1<<ADPS2)|(1<<ADPS1)|(1<<ADPS0);
ADCSRB = 0;
DIDR0 = 0;
sei();
// main loop
while(1){
//===плавный старт===
if (start_first==0){
// read ADC
while(ADCSRA & (1<<ADSC));
pwm_set = ADCH;
ADCSRA |= (1<<ADSC);
STOP =ADCH;
for (pwm_cur = 0xFF; pwm_cur > STOP; pwm_cur--){
for (int k = 0; k<10000; k++){ // ПОТОМ УБРАТЬ !!!
pwm_set =ADC;
}
}
start_first = 1;
}
//===================
// ZC sync
if (sync_flag){
sync_flag = 0;
// decrement startup timer
if (startup_cnt) startup_cnt--;
// update limiters
else
if (limit_en == 1){ // limit increment
if (limit < (0xFF - LIMIT_INC)) limit += LIMIT_INC;
else {
limit = 0xFF;
limit_en= 0;
}
}
else if (limit_en== 2){ // limit decrement
if (limit> LIMIT_INC) limit-= LIMIT_INC;
else {
limit= 0;
limit_en= 0;
}
}
uint8_t
pwm = (!pwm_set) ? 0 : (pwm_set < limit) ? pwm_set : limit;
pwm = pwm_top - (((uint16_t)pwm * pwm_top) >> 8 ) ;
pwm_cur = (startup_cnt || (pwm_set < PWM_MIN)||((pwm_top - pwm) < PWM_MAX_DIF)) ? 0 : pwm;
// read ADC
while(ADCSRA & (1<<ADSC));
pwm_set = ADCH;
ADCSRA |= (1<<ADSC);
}
}
// exit
return 0;
}
ISR(TIM0_COMPB_vect){
if (pwm_cur){
pwm2_on();
sei();
if (pwm_ac){
_delay_us(PWM_AC_PULSE);
pwm2_off();
}
}
}
ISR(TIM0_OVF_vect){
pwm2_off(); // PWMs off
pwm_top = 0xFF; // update PWM top
OCR0B = pwm_cur; // reload PWMs
sync_flag = 1; pwm_ac = 0; // set Sync flag / reset AC flag
TIFR0 |= (1<<OCF0A)|(1<<OCF0B); // reset capture interrupts
}
// external interrupt on zero-cross
ISR(PCINT0_vect){
pwm2_off(); // PWMs off
pwm_top = TCNT0; // get PWM top
// uint8_t cnt = TCNT0; // get PWM top
TCNT0 = 0; // reset TCNT0
OCR0B = pwm_cur; // reload PWMs
sync_flag = pwm_ac = 1; // set Sync/AC flag
// pwm_top = ((uint16_t)cnt + pwm_top) >> 1; // filter PWM top
TIFR0 |= (1<<OCF0A)|(1<<OCF0B)|(1<<TOV0); // reset capture interrupts
}
ни фига не получается плавный пуск
- Код:
uint8_t
pwm = (!pwm_set) ? 0 : (pwm_set < limit) ? pwm_set : limit;
pwm = pwm_top - (((uint16_t)pwm * pwm_top) >> 8);
pwm_cur = (startup_cnt || (pwm_set < PWM_MIN)||((pwm_top - pwm) < PWM_MAX_DIF)) ? 0 : pwm;
а что тут написано? кто нибуть может прочитать и пояснить?
Re: плавный пуск + регулятор скорости коллекторного двигател
Пн окт 05, 2020 12:07:25
основоположников почитать - понятнее будет
2.11 Условные выражения
Инструкции
пересылают в z большее из двух значений a и b. Условное выражение, написанное с помощью тернарного (т. е. имеющего три операнда) оператора "?: ", представляет собой другой способ записи этой и подобных ей конструкций. В выражении
выр1 ? выр2 : выр3
первым вычисляется выражение выр1. Если его значение не нуль (истина), то вычисляется выражение выр2, и значение этого выражения становится значением всего условного выражения. В противном случае вычисляется выражение выр3 и его значение становится значением условного выражения. Следует отметить, что из выражений выр2 и выр3 вычисляется только одно из них. Таким образом, чтобы установить в z большее из a и b, можно написать
https://www.rulit.me/books/yazyk-progra ... section_34
2.11 Условные выражения
Инструкции
- Код:
if (a › b)
z = a;
else
z = b;
пересылают в z большее из двух значений a и b. Условное выражение, написанное с помощью тернарного (т. е. имеющего три операнда) оператора "?: ", представляет собой другой способ записи этой и подобных ей конструкций. В выражении
выр1 ? выр2 : выр3
первым вычисляется выражение выр1. Если его значение не нуль (истина), то вычисляется выражение выр2, и значение этого выражения становится значением всего условного выражения. В противном случае вычисляется выражение выр3 и его значение становится значением условного выражения. Следует отметить, что из выражений выр2 и выр3 вычисляется только одно из них. Таким образом, чтобы установить в z большее из a и b, можно написать
- Код:
z = (a › b) ? a: b; /* z = max(a, b) */
https://www.rulit.me/books/yazyk-progra ... section_34
Re: плавный пуск + регулятор скорости коллекторного двигател
Пн окт 05, 2020 13:10:17
? : что это значит я понимаю...
я про другое спрашивал, что мы здесь считаем в этом именно коде
я про другое спрашивал, что мы здесь считаем в этом именно коде
uint8_t
pwm = (!pwm_set) ? 0 : (pwm_set < limit) ? pwm_set : limit;
pwm = pwm_top - (((uint16_t)pwm * pwm_top) >> 8 );
pwm_cur = (startup_cnt || (pwm_set < PWM_MIN)||((pwm_top - pwm) < PWM_MAX_DIF)) ? 0 : pwm;