Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вс фев 18, 2024 13:08:04
собрал, прошил, вроде работает, но как то не понятно.
при попытке запуска стартером - ноль эмоций, а если рукой дернуть - запуск с пол пинка. не понятно с чем связано.
и болше 6 тысяч не крутится мотор.
при попытке запуска стартером - ноль эмоций, а если рукой дернуть - запуск с пол пинка. не понятно с чем связано.
и болше 6 тысяч не крутится мотор.
- Вложения
-
- Dingo2.lay
- (184.53 KiB) Скачиваний: 22
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вс фев 18, 2024 14:26:01
собрал, прошил, вроде работает, но как то не понятно.
при попытке запуска стартером - ноль эмоций, а если рукой дернуть - запуск с пол пинка. не понятно с чем связано.
и болше 6 тысяч не крутится мотор.
при попытке запуска стартером - ноль эмоций, а если рукой дернуть - запуск с пол пинка. не понятно с чем связано.
и болше 6 тысяч не крутится мотор.
А это следствие Вашего самоуправства. Входные каскады у Вас собственные и на оборотах выше 6000 из датчика "лезут" сигналы от зарядной системы.
На стартере обороты 400-500 это мало, чтобы индуктивный датчик, шунтированный резистором дал адекватный сигнал.
Вроде не скрывали входной каскад.
Добавлено after 18 minutes 40 seconds:
и еще....
Оптопара у меня не просто такая выбрана.
1. Она "дубовая" - ток включений 1мА и выше.
2. В ней есть триггер Шмидта.
С ней самый лучший результат получился - до 12 тыс оборотов.
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вс фев 18, 2024 14:41:55
[uquote="ZyaK",url="/forum/viewtopic.php?p=4544698#p4544698"]
Оптопара у меня не просто такая выбрана.
1. Она "дубовая" - ток включений 1мА и выше.
2. В ней есть триггер Шмидта.
С ней самый лучший результат получился - до 12 тыс оборотов.
Оптопара у меня не просто такая выбрана.
1. Она "дубовая" - ток включений 1мА и выше.
2. В ней есть триггер Шмидта.
С ней самый лучший результат получился - до 12 тыс оборотов.
понял, оптопары есть такие, буду менять. фильтр по входу добавлю
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вс фев 18, 2024 14:43:07
ZyaK.Входная цепь схемы сделана и на практике протестирована осциллографом и работает выше 12700 оборотов на нашей схеме,а ваша работать не будет,пробовали.
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вс фев 18, 2024 17:45:57
Я так понимаю, что после изменения входной цепи запуск с электро стартера будет нормальный? А то кикстартера или ручной шворгалки на снегоходе нет  трещетка с головкой на 19 и на первой передаче или второй... То ещё
трещетка с головкой на 19 и на первой передаче или второй... То ещё
удовольствие. Первый запуск был вообще на горячую, на родном коммутаторе запустил, плата работала в параллель. На заведенном моторе зашунтировал провод на катушку и отключил коммутатор, обороты просели где тот на 300-400.
Добавлено after 4 minutes 28 seconds:
Пытался разобрать свой родной коммутатор, который давным давно сгорел - не получилось. Капитально залит пластиком. Вот на нём обратного пинка при запуске не было и никогда в обратку не чихал мотор и не запускался. Сейчас стоит какой то безымянный коммутатор и на нём бывает мотор пытается запуститься назад (слишком раннее зажигание) бывает что даже успешно запускается и едет на первой передаче метр назад. От всего этого достаётся обгонной муфте стартера.
удовольствие. Первый запуск был вообще на горячую, на родном коммутаторе запустил, плата работала в параллель. На заведенном моторе зашунтировал провод на катушку и отключил коммутатор, обороты просели где тот на 300-400.
Добавлено after 4 minutes 28 seconds:
Пытался разобрать свой родной коммутатор, который давным давно сгорел - не получилось. Капитально залит пластиком. Вот на нём обратного пинка при запуске не было и никогда в обратку не чихал мотор и не запускался. Сейчас стоит какой то безымянный коммутатор и на нём бывает мотор пытается запуститься назад (слишком раннее зажигание) бывает что даже успешно запускается и едет на первой передаче метр назад. От всего этого достаётся обгонной муфте стартера.
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вс фев 18, 2024 18:12:10
Я так понимаю, что после изменения входной цепи запуск с электро стартера будет нормальный
Очень надеюсь...плата работала в параллель..
Такой режим не предусмотрен и не желателен.
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вс фев 18, 2024 20:22:13
в общем входные цепи изменил, крутится до 10 уверенно, но запуска со стартера всё так же нет, хотя с трещетки за вал с первой вспышки запускается. на китайском коммутаторе запуск со стартера без проблем.
завтра должна новая обгонка приехать, поменяю и там видно будет.
пока расковырял китайский коммутатор, кинул в расстворитель. хочу номиналы посмотреть.
родной, который весь был залит пластиком очень сильно отличается от этого по схемотехнике, внутри очень много транзисторов в корпусе sot23, но при попытке разбора ничего не выжило
завтра должна новая обгонка приехать, поменяю и там видно будет.
пока расковырял китайский коммутатор, кинул в расстворитель. хочу номиналы посмотреть.
родной, который весь был залит пластиком очень сильно отличается от этого по схемотехнике, внутри очень много транзисторов в корпусе sot23, но при попытке разбора ничего не выжило
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вс фев 18, 2024 20:47:43
..но запуска со стартера всё так же нет...
Печалька. Причин может быть несколько.
Первое - питания точно хватает в момент работы стартера? Вообще-то надо +12 подключать через диод. Во время проседания питания "контроллер" немного "поживет" от кондера большого, который на плате тоже должен быть. Кроме того, этот диод также спасает от бросков питания. Банка на плате есть вроде. Диода нет.
Второе - Надо сверить параметры Delta и Beta. 47 и 10 по Вашей моторной части вызывают сомнения.
Третье - частоту Ядра надо снижать до 500 кГц. Писал вроде, что для одного цилиндра много слишком у Вас. Сейчас у Вас 1500 минимальные обороты в программе OUZ.
Добавлено after 8 minutes:
Добавлю...
В программе UOZ на работающем в ХХ двигателе в правом нижнем углу программы нажмите кнопку M. Программа начнет измерять один параметр - Delta. (Длина метки)
Так там еще и импульсный блок питания. Уверены, что без него никак?
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вс фев 18, 2024 21:01:11
Частоту снизил до 400, плата питается от обратноходового преобразователя на 1 ампер, который выдерживает до 50в по входу спокойно LM2675.
конденсатор по выходу 220 тантал и гора керамики по всей плате, попробую еще электролит хороший добавить.
по поводу длинны метки завтра попробую.
и завтра посмотрю что там в китайском коммутаторе напихано, срисую схему с элементами
конденсатор по выходу 220 тантал и гора керамики по всей плате, попробую еще электролит хороший добавить.
по поводу длинны метки завтра попробую.
и завтра посмотрю что там в китайском коммутаторе напихано, срисую схему с элементами
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Пн фев 19, 2024 11:57:19
Обратил вчера ещё внимание, что во время прокрутки стартером в программе красный индикатор погасал, как будто бы обороты он видит, что то мне подсказывает, что не хватает нормальной скорости от стартера, чтоб зарядить ёмкость высоким напряжением.
Есть ли смысл попробовать сделать удвоитель напряжения высоковольтной катушки? На тех же 2-х диодах и конденсаторе?
Есть ли смысл попробовать сделать удвоитель напряжения высоковольтной катушки? На тех же 2-х диодах и конденсаторе?
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Пн фев 19, 2024 12:53:44
Должно хватать. На стоке стратером заводиться, значит хватает. Тут скорее всего проблема ошибки вычислениях на основе неправильно заданных парамеиров. Писал выше. Конечно при условии не изменения ёмкости cdi .
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Пн фев 19, 2024 13:23:53
вот наткнулся на такую схему
https://yandex.ru/images/search?from=ta ... %20вариант
https://yandex.ru/images/search?from=ta ... di%20схема
https://yandex.ru/images/search?from=ta ... %20вариант
{kind=link}
https://yandex.ru/images/search?from=ta ... di%20схема
{kind=link}
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Пн фев 19, 2024 17:57:10
Давайте проверим параметры для начала.
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Пн фев 19, 2024 20:44:03
Чтоб здесь не спамить скинул видео в ВК не могу понять то ли в личку, то ли в группу
в общем то запуск осталось решить. стартер бодрее всех, почему с пол пинка руки он запускается, а со стартера не хочет при этом на китайском коммутаторе со стартера запуск есть... дела...
при этом на китайском коммутаторе со стартера запуск есть... дела...
завтра уберу экранизацию вокруг линий высоковольтных, оставлю только экран вокруг низковольтной части, но что то мне подсказывает разницы не будет
в общем то запуск осталось решить. стартер бодрее всех, почему с пол пинка руки он запускается, а со стартера не хочет
завтра уберу экранизацию вокруг линий высоковольтных, оставлю только экран вокруг низковольтной части, но что то мне подсказывает разницы не будет
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вт фев 20, 2024 10:06:04
Здравстуйте коллеги. Помогите правильно описать входные линии для 4х-тактного мотора мопеда "Альфа(Дельта)". Использую ПО -1Ц.ИД(без удлинения метки). С заполнением таблиц " UOZMaker" проблем нету, а с работой графического калькулятора " EventMaker" есть вопрос. По умолчанию в ПО используются следующие константы: EventMask0=00110010 EventMask1=00111000. В этом случае графический калькулятор показывает ложное срабатывание в момент "наплыва входных сигналов". Если использоать комбинацию EventMask0=EventMask1=00110010 то ошибки не возникает. однако так не делается- почему, что я упускаю?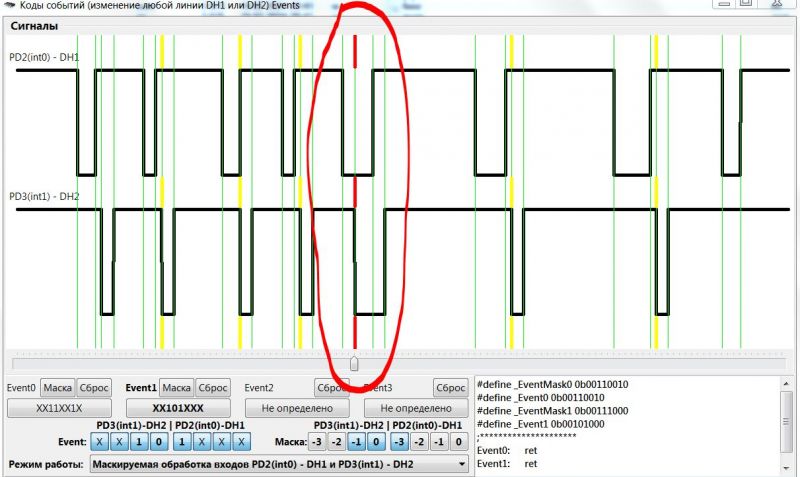

Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вт фев 20, 2024 13:08:22
День добрый.
Дело в том, что это чуть ли не единственное место без автоматизации. Поэтому как бы Вы не крутили этот калькулятор - внесение в файл main.asm только вручную.
Правильно было бы вот такой набор для индуктивного датчика:

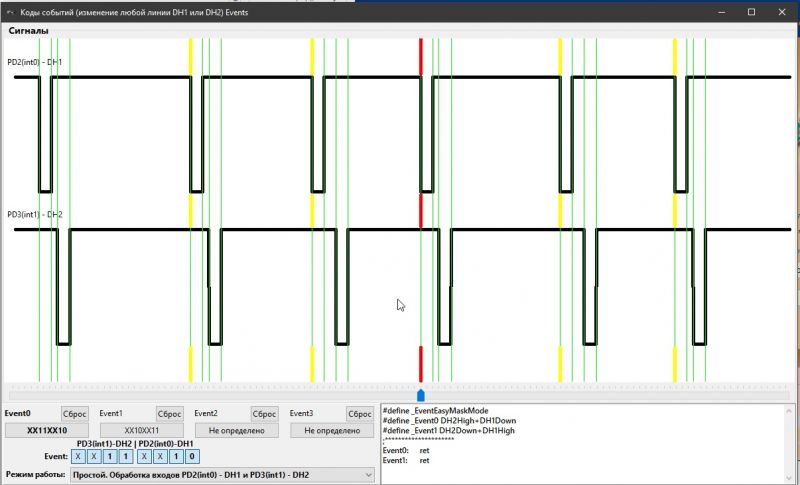
#define _EventEasyMaskMode
#define _Event0 DH2High+DH1Down
#define _Event1 DH2Down+DH1High
Однако на моторах, где выступ на маховике 20 и менее градусов существует не нулевая вероятность "слипания" цифровых аналогов положительного и отрицательного импульса сигнала индуктивного датчика - то есть одновременно и не законченный положительный сигнал и начинающийся отрицательный. В реале конечно это один и тот же аналоговый сигнал, просто он сразу из положительного перескакивает в отрицательный без промежуточного нулевого значения. Введение масок по идеи должно было защитить от этой ситуации.
Я перепроверю маски и добавлю что нибудь.
Добавлено after 23 minutes 24 seconds:
Разобрался.
Это особенность программы.
Ваш первый рисунок - Это не ложно срабатывание, а эмуляция "слипания" цифровых аналогов положительного и отрицательного импульса одного и того-же индуктивного датчика.
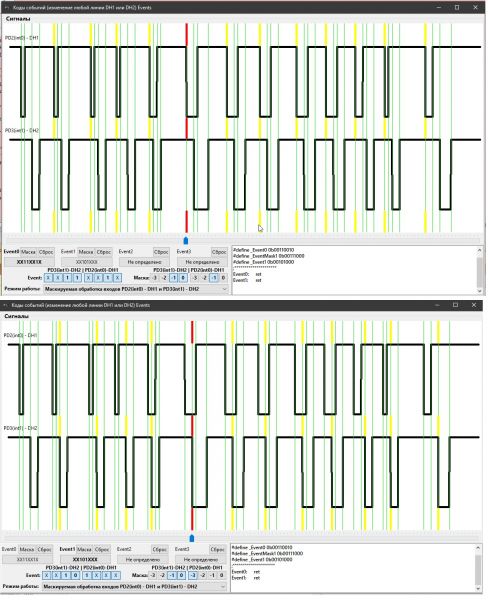
Ваш второй рисунок - Есть текущая маска и маски событий. Например нажмите на кнопку Маска около события Event1. Маска будет скопирована в текущую. Теперь подвигайте курсор (красная линия). У Вас выбрано событие 0, а маска подгружена с события 1.
Короче всё нормуль.

#define _EventMask0 0b00110010
#define _Event0 0b00110010
#define _EventMask1 0b00111000
#define _Event1 0b00101000
Дело в том, что это чуть ли не единственное место без автоматизации. Поэтому как бы Вы не крутили этот калькулятор - внесение в файл main.asm только вручную.
Правильно было бы вот такой набор для индуктивного датчика:
#define _EventEasyMaskMode
#define _Event0 DH2High+DH1Down
#define _Event1 DH2Down+DH1High
Однако на моторах, где выступ на маховике 20 и менее градусов существует не нулевая вероятность "слипания" цифровых аналогов положительного и отрицательного импульса сигнала индуктивного датчика - то есть одновременно и не законченный положительный сигнал и начинающийся отрицательный. В реале конечно это один и тот же аналоговый сигнал, просто он сразу из положительного перескакивает в отрицательный без промежуточного нулевого значения. Введение масок по идеи должно было защитить от этой ситуации.
Я перепроверю маски и добавлю что нибудь.
Добавлено after 23 minutes 24 seconds:
Разобрался.
Это особенность программы.
Ваш первый рисунок - Это не ложно срабатывание, а эмуляция "слипания" цифровых аналогов положительного и отрицательного импульса одного и того-же индуктивного датчика.
Ваш второй рисунок - Есть текущая маска и маски событий. Например нажмите на кнопку Маска около события Event1. Маска будет скопирована в текущую. Теперь подвигайте курсор (красная линия). У Вас выбрано событие 0, а маска подгружена с события 1.
Короче всё нормуль.
#define _EventMask0 0b00110010
#define _Event0 0b00110010
#define _EventMask1 0b00111000
#define _Event1 0b00101000
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вт фев 20, 2024 15:47:27
Понял, меня смутила реакция системы на "слипания", предполагал что такого не должно быть. Спасибо.
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Ср фев 21, 2024 17:18:18
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Сб фев 24, 2024 19:59:28
Ну чтож, вот и я стал счастливым обладателем фильтра!
Мотор 154 fmi это честный 125 кубовый мотор с полуавтоматом 3 вперёд, одна назад.
Установлен на снегоходе динго 125.
https://youtube.com/shorts/pUIy79CYN0E? ... J06exdY_d2
Испытания в лесу прошли на ура! В первую очередь интересовал угол опережения при запуске мотора. Чтоб не было обратного удара при запуске со стартера с вялым аккумулятором и с руки.
На снегоходе рабочие обороты от 5500 и до упора, по этому график меня не сильно тревожит. В принципе если после 3500 дать сразу максимальный угол - я даже не почувствую. Хочется после 7к угол ещё злее. Детонации нет. Мотор позволяет надо добавить метку физически.
Мотор 154 fmi это честный 125 кубовый мотор с полуавтоматом 3 вперёд, одна назад.
Установлен на снегоходе динго 125.
https://youtube.com/shorts/pUIy79CYN0E? ... J06exdY_d2
Испытания в лесу прошли на ура! В первую очередь интересовал угол опережения при запуске мотора. Чтоб не было обратного удара при запуске со стартера с вялым аккумулятором и с руки.
На снегоходе рабочие обороты от 5500 и до упора, по этому график меня не сильно тревожит. В принципе если после 3500 дать сразу максимальный угол - я даже не почувствую. Хочется после 7к угол ещё злее. Детонации нет. Мотор позволяет надо добавить метку физически.
Re: Конструктор ФУОЗ для одноцилиндрового двигателя
Вс фев 25, 2024 12:46:30
....На снегоходе рабочие обороты от 5500 и до упора, по этому график меня не сильно тревожит. В принципе если после 3500 дать сразу максимальный угол - я даже не почувствую. Хочется после 7к угол ещё злее. Детонации нет. Мотор позволяет надо добавить метку физически.
Я не большой спец по двигателям. Однако предполагаю, что нет там того запаса.
Есть небольшой запас в 1.5 - 2 градуса, которые прошивка тратит на расчёт уоз после первого сигнала от датчика. Их можно использовать немного изменив прошивку. Ведь на больших оборотах на Вашем агрегате не надо уже вычислять Уоз, так пусть будет сразу по этому импульсу. Надо ограничить контроллируемые обороты сверху 5000 и сделать принудительную искру на оборотах выше 5000 по первому импульсу. Так уже делали.